Luca Sorrentino
My personal Portfolio
-
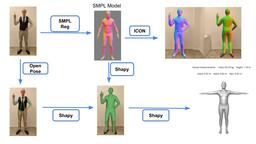
Accurate 3D avatar from single 2D image
This project presents a simple way to generate a realistic virtual 3D avatar from one single 2D image. This avatar maintains the body details like clothes and hair and accurate body shape proportions. In fact, it is shown how it's possible to infer the original body measurements from the virtual ones.
-

ML Ops Tool: make every experiment reproducible
This is a list of tools and tips to create a fully reproducible experiments. Versioning the code is not eought when we talk about reproducing a Deep Learning training. We also being able to reproduce the environment, the data, and the exactly same parameters. In ordet to do that I pesent some usefull tool like: code versioning (Git), data versioning (DVC), experiment logging and automatic hyper-parameter tuning (Weight & Biases), configuration handler (Hydra), and portable environment (Docker and Poetry).
-

Overcoming the limits of Deep Reinforcement Learning with Model-Based approach
In this thesis, one of the state-of-the-art Model-Based DRL algorithm called PlaNet is deeply investigated and compared with the model-free DRL algorithms. All the experiments are based on Deepmind Control Suite that is a set of continuous control tasks that are built for benchmarking reinforcement learning agents. All the examined algorithms were tested on a subset of four environments. The main strengths and weaknesses of both approaches are highlighted in order to show if and how much a Model-Based RL can overcome the limits of Model-Free RL.
-

Go Deep In Deep Learning PT2: Deep Learning Specialization
As announced at the end of the previous article, once completed the introduction course at Andrew's Machine Learning I started his specialization course called Deep Learning Specialization on Coursera. The course is structured in 5 sub-courses: Neural Networks and Deep Learning; Improving Deep Neural Networks; Structuring Machine Learning Projects; Convolutional Neural Networks; Sequence Models.
-

Go Deep In Deep Learning: My parallel master degree in deep learning
I started a Master Degree in computer science and in parallel I started to studies deep learning from online courses. I prepared a plan for 2 years, taking the best courses that I found from Coursera, Khan Academy, Google, fast.ai, Mit...and i plan to follow them during my study at university. I make available all my personal notes, my solved questionnaires, and my programming assignments. You can follow my path step by step and take what you need, whether they are explanations, cues on which courses to follow, or source code of the projects that I will develop when I have enough knowledge.
-

Node_car: A Remote Controlled Raspberry Car With Node.js
This project consists of a robot built with Raspberry Pi 3 that can be controlled remotely. The first server (written in Node.js) listens to commands from the client while another server (written in python) transmits the images captured by the robot's camera. The connection is established via Wi-Fi, so you can control it from your pc (keyboard), your tablet (touchscreen) or even from your smartphone (touchscreen plus accelerometer).
-

Pierre: Solving Problems By Intelligent Search
The idea is to solve any problems without having to re-implement the algorithms every time and to provide a different resolution strategy to solve each problem. To achieve this goal I use c because it is fast and I combine it with a high-level approach oriented to object programming, through the use of struct, void pointer and function pointers.